项目介绍
巡检、消杀无人机系统

在当前国家大力推进科技自立自强与产业数字化升级的背景下,室外作业的智能化、无人化已成为关键发展趋势。为应对园区、道路等复杂环境下的巡检与消杀需求,我们研发了“智能巡检消杀无人车系统”。本项目旨在打造一个集高精度感知、自主决策与稳定持续作业能力于一体的国产化无人作业平台,有效解决传统人工作业效率低、风险高以及现有部分方案依赖国外技术所带来的安全隐患问题。
本系统的核心研究内容在于构建一个多层次、高鲁棒性的技术架构。在感知层,我们深度融合了多项先进传感器技术:通过RTK差分定位模块获取厘米级的高精度位置信息,为路径规划和自主导航奠定坚实基础;利用多线机械激光雷达对周围环境进行实时三维扫描,精准探测障碍物轮廓与距离;辅以高性能车牌识别摄像头,进一步丰富了系统的物体识别与数据采集维度。这三者共同构成了系统强大的“眼睛”,使其能够全面、精确地理解复杂多变的室外环境。
在数据处理与决策层,系统创新性地采用了“云-边-端”协同的计算模式。通过车载网关,系统支持4G/WiFi双通道数据传输,确保了通信链路的冗余与可靠性。尤为关键的是,我们引入了高性能边缘计算网关,将核⼼的AI处理任务(如动态障碍物识别、异常事件实时分析、消杀决策等)下沉至本地执行。这种设计不仅显著降低了对云端计算的持续依赖与网络带宽压力,更极大地缩短了系统响应延迟,使无人车在面对突发状况时能够实现毫秒级的自主避障与智能反应,提升了作业的智能化水平与安全性。
在持续运行保障方面,系统专门配备了UPS不间断电源系统。这一设计确保了在遭遇突发性外部断电等极端工况时,无人车能够维持关键系统的正常运行,并执行安全返航或待机等指令,从而实现了在指定区域内真正的全天候、不间断作业能力。
技术创新点
多维高精度融合感知系统
集成RTK、多线激光雷达和视觉摄像头,构建了适用于复杂室外场景的厘米级定位与三维环境感知能力,克服了单一传感器的局限性。
云-边协同的智能决策架构
通过部署边缘计算网关,实现了AI任务的本地化实时处理,降低了系统延迟和对云端通信的依赖,提升了作业自主性与可靠性。
高可靠性的能源与通信设计
采用UPS不间断电源保障关键任务不掉线,并结合4G/WiFi双通道数据传输,确保了在复杂环境下的持续运行与通信链路冗余。
面向复杂场景的国产化全栈解决方案
平台技术自主可控,集成了从感知、决策到执⾏的完整技术链,针对室外巡检与消杀任务提供了高可靠、强自主性的国产化系统集成答案。


应用场景
该平台可广泛应用于园区巡检、道路巡查、公共消杀及应急响应等复杂室外场景,实现全天候、无人化的高效自主作业。
成果转化方式
股权投资、风险投资、许可使用、合作开发、合作兴办新企业
空地一体智能识别道路保洁机器人系统

为深度契合环卫工作“全覆盖巡检、精确定位、高效清扫”的核心需求,公司通过自研无人机智能巡查平台与大模型 AI 识别技术,精准识别垃圾,同时通过自动告警推送与地面无人清扫车的智能协同度,实现“识别—告警—调度—清扫”全链路闭环。与传统人工环卫模式相比,大幅降低一线人工劳动强度,提升环卫作业的精细化管理水平,实现高效低碳的环境治理目标。

本系统“无人化+智能化”深度整合,同时实现无人机与清扫车的全自主运行,打破行业内“单设备自动化”的局限,构建“空巡覆盖+地扫落地”的一体化解决方案,技术独特性与行业领先性显著,为环卫智能化升级提供全新范式。
中鑫航数字孪生智慧城市平台
中鑫航数字孪生智慧城市平台是面向新型智慧城市建设的新一代“城市级数字操作系统”,贯穿“数据中台—战略导向”,以“全要素数字化、全状态实时化、全流程智能化”为核心特性,通过物理城市与数字城市的精准映射,支撑“可视化考察、可视化管理、可视化决策”的一体化闭环,实现城市级决策的跨模式升级,重构城市管理维度,为城市规划等提供集成空间支撑。
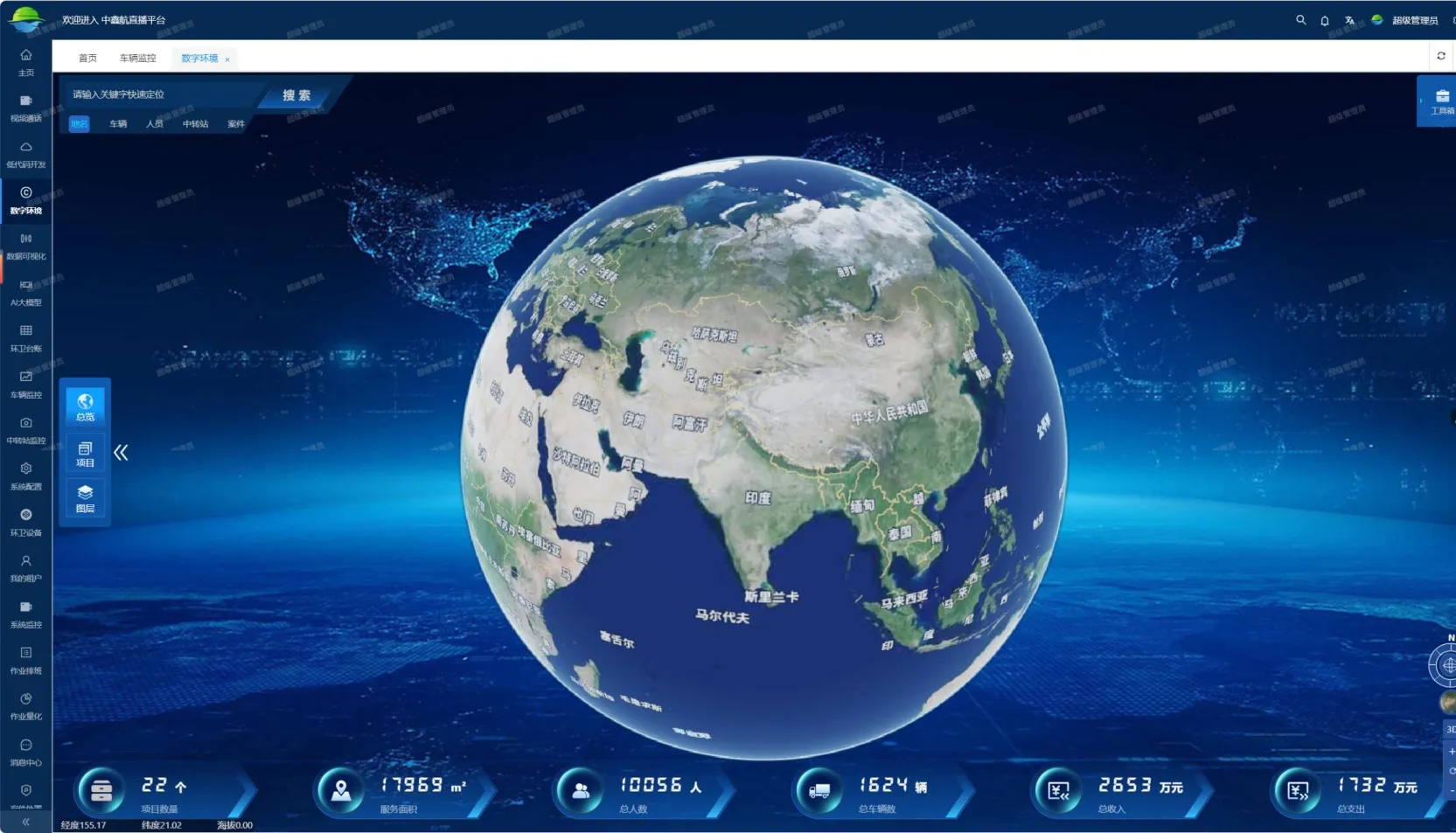
一、中观区域高精度孪生
以中观区域高精度孪生为载体,打通城市全域资源宏观视图,实现“全局态势一眼洞察”全域要素概览。在数字地球模型上可视化呈现重点项目分布、人员规模等关键指标,掌握城市运行宏观态势,支持多维度搜索定位。
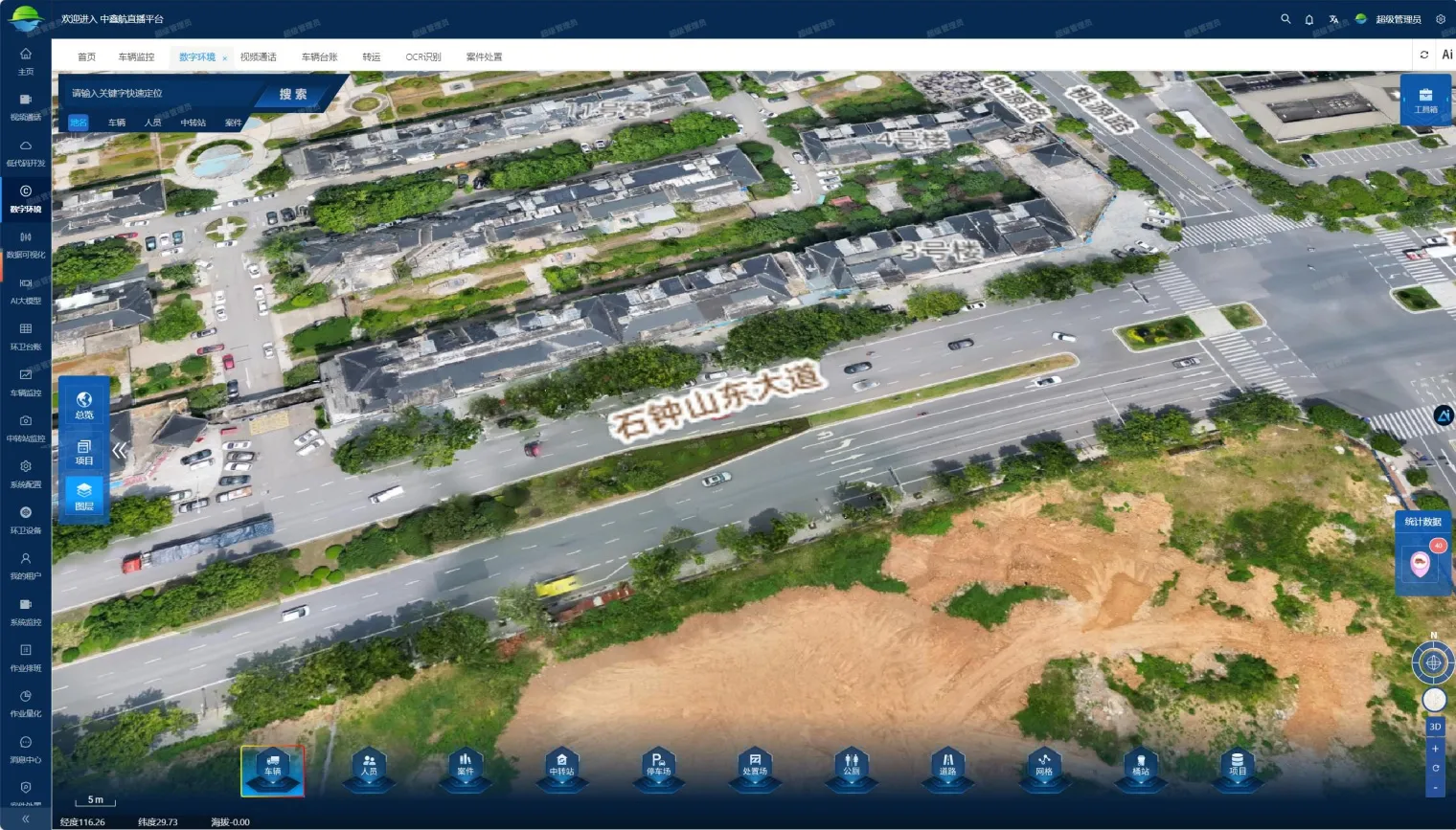
二、中观区域高精度孪生
聚焦重点区域(产业园区、交通枢纽、核心商圈、政务新区),实现空间要素映射与动态关联:对道路、河流等一维建设,还原区域空间特征与拓扑关系;叠加车辆、人员等要素,展示分布关联状态,支撑协同治理。
三、微观现场高精度孪生
针对城市关键场(主干道路、交通路口、核心设施、重点建筑)进行毫米级建模,为精细化管理与应急处置提供空间支撑。