Projects
Inspection and extermination unmanned aerial systems

Under the background of the current national efforts to promote scientific and technological self-reliance and industrial digital upgrading, intelligent and unmanned outdoor work has become a key development trend. In order to meet the needs of inspection and extermination in complex environments such as parks and roads, we have developed the “Intelligent Inspection and Elimination Unmanned Vehicle System”. This project aims to build a domestic unmanned operation platform integrating high-precision sensing, autonomous decision-making and stable and continuous operation capability, which effectively solves the problems of low efficiency and high risk of traditional manual operation, as well as the safety hazards caused by the dependence of some existing solutions on foreign technologies.
The core research content of this system is to construct a multi-layered and highly robust technical architecture. In the perception layer, we deeply integrate a number of advanced sensor technologies: obtaining centimeter-level high-precision position information through RTK differential positioning module, which lays a solid foundation for path planning and autonomous navigation; real-time 3D scanning of the surrounding environment using multi-line mechanical LIDAR, which accurately detects obstacle contours and distances; and supplementing the system with a high-performance license plate recognition camera, which further enriches object recognition and data acquisition dimensions of the system. The high performance license plate recognition camera further enriches the object recognition and data acquisition dimension of the system. These three together constitute the powerful “eyes” of the system, enabling it to comprehensively and accurately understand the complex and changing outdoor environment.
At the data processing and decision-making level, the system innovatively adopts the “cloud-edge-end” collaborative computing model. Through the on-board gateway, the system supports 4G/WiFi dual-channel data transmission, which ensures the redundancy and reliability of the communication link. Especially, we introduced a high-performance edge computing gateway to sink AI processing tasks (e.g., dynamic obstacle recognition, real-time analysis of abnormal events, and decision-making for elimination) of the core⼼to local execution. This design not only significantly reduces the continuous reliance on cloud computing and network bandwidth pressure, but also greatly shortens the system response delay, enabling the unmanned vehicle to achieve millisecond-level autonomous obstacle avoidance and intelligent response in the face of unexpected situations, and improving the level of intelligence and safety of operations.
In terms of continuous operation guarantee, the system is specially equipped with a UPS uninterruptible power supply system. This design ensures that when encountering extreme working conditions such as sudden external power outages, the unmanned vehicle is able to maintain the normal operation of key systems and carry out commands such as safe return or standby, thus realizing true all-weather, uninterrupted operation capability in the designated area.
Technology Innovation Points
Multi-dimensional high-precision fusion sensing system
The integration of RTK, multi-line LIDAR and vision camera builds a centimeter-level positioning and 3D environment sensing capability suitable for complex outdoor scenes, overcoming the limitations of a single sensor.
Intelligent Decision Architecture for Cloud-Edge Collaboration
By deploying an edge computing gateway, localized real-time processing of AI tasks is achieved, reducing system latency and dependence on cloud communications, and improving job autonomy and reliability.
Highly reliable energy and communication design
The use of UPS uninterruptible power supply to safeguard mission-critical without dropping out, and the combination of 4G/WiFi dual-channel data transmission ensures continuous operation and communication link redundancy in complex environments.
Localized full-stack solutions for complex scenarios
The platform's technology is autonomous and controllable, integrating a complete technology chain from sensing, decision-making to execution, and providing a highly reliable and highly autonomous localized system integration answer for outdoor inspection and extermination tasks.


application scenario
The platform can be widely used in complex outdoor scenarios such as park inspection, road inspection, public extermination and emergency response, realizing all-weather, unmanned and efficient autonomous operation.
Results-based approach
Equity investment, venture capital, licensing, co-development, co-establishment of new enterprises
Intelligent Recognition Road Cleaning Robot System for Air and Land Integration

In order to meet the core demand of “full-coverage inspection, precise positioning and efficient sweeping” of sanitation work, the company accurately identifies garbage through self-developed UAV intelligent inspection platform and large model AI recognition technology, and at the same time realizes “ identification-alarm-scheduling-sweeping” full-link closed loop through the intelligent synergistic degree of automatic alarm push and ground unmanned sweeping vehicle. Recognition-alarm-scheduling-sweeping" full chain closed loop. Compared with the traditional manual sanitation mode, it significantly reduces the labor intensity of frontline labor, improves the fine management level of sanitation operations, and realizes the goal of efficient and low-carbon environmental governance.

This system integrates “unmanned + intelligent” in depth, realizes the fully autonomous operation of drones and sweepers, breaks the limitation of “single equipment automation” in the industry, and builds an integrated solution of “air patrol coverage + ground sweeping on the ground”. The integration solution of "air patrol coverage + ground sweeping landing", with remarkable technical uniqueness and industry leadership, provides a brand-new paradigm for the intelligent upgrade of sanitation.
Zhongxinhang Digital Twin Smart City Platform
Zhongxinhang Digital Twin Smart City Platform is a new-generation “city-level digital operating system” for the construction of a new smart city, running through the “data center - strategy-oriented”, with “full digitalization of elements, full real-time status and full process intelligence” as its core features. With the core characteristics of “digitalization of all elements, real-time of all states, and intelligence of all processes”, it supports the integrated closed loop of "visual inspection, visual management, and visual decision-making" through the accurate mapping of physical city and digital city, realizes the cross-mode upgrade of city-level decision-making, and reconfigures the dimensions of city management, and provides integrated spatial support for urban planning. It provides integrated spatial support for urban planning.
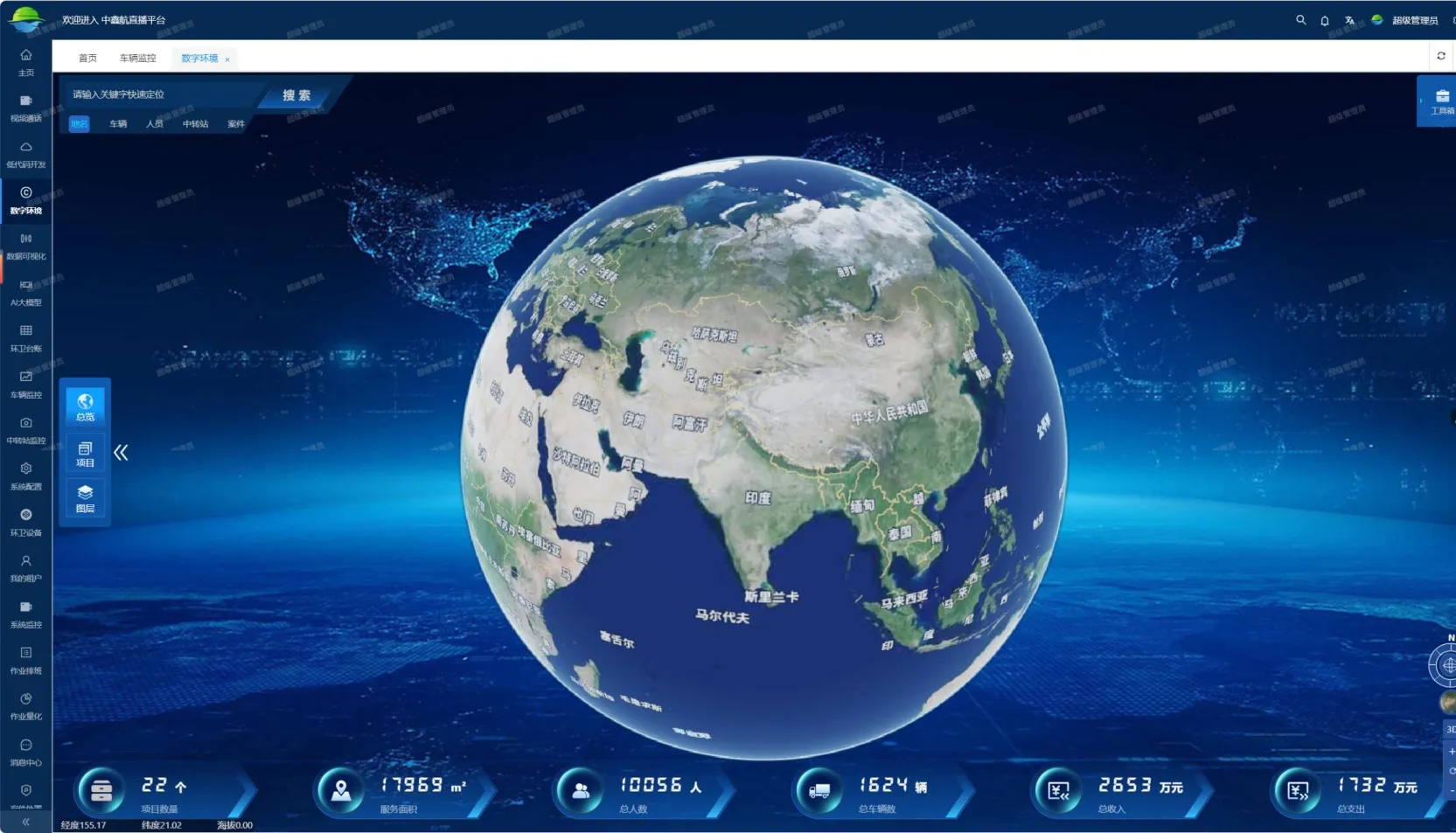
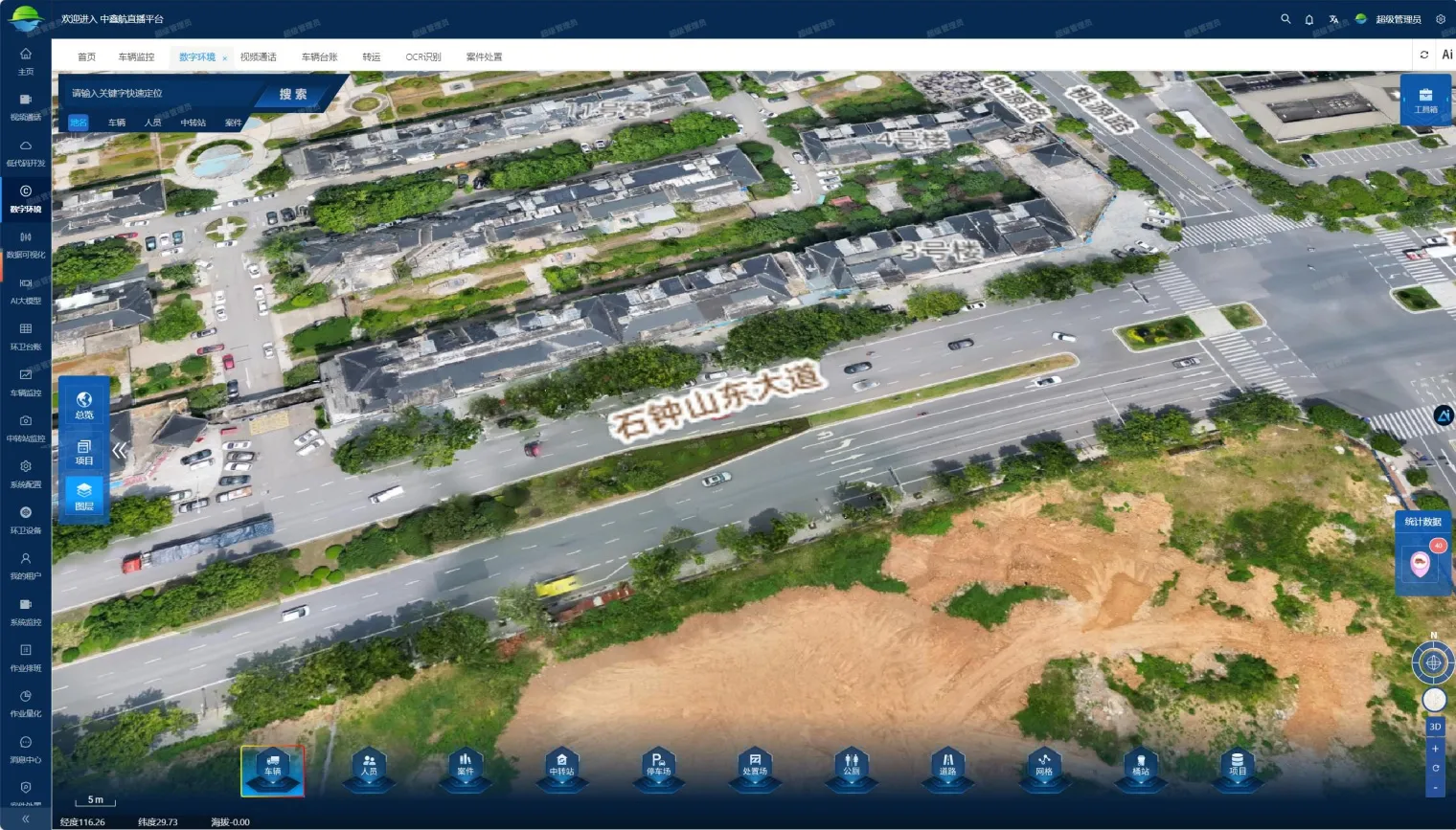
I. High-precision twinning in meso-regions
Taking the high-precision twinning of meso-region as the carrier, it opens up the macro view of the city's overall resources and realizes the “global situation at a glance” overview of the overall elements. Visualize the distribution of key projects, personnel scale and other key indicators on the digital earth model, grasp the macro situation of urban operation, and support multi-dimensional search and positioning.
II. High-precision twinning in meso-regions
Focusing on key areas (industrial parks, transportation hubs, core business districts, governmental new districts), it realizes spatial element mapping and dynamic correlation: one-dimensional construction of roads, rivers, etc., to restore regional spatial characteristics and topological relationships; superimposed on the vehicles, people and other elements, to show the distribution of correlation status, and to support collaborative governance.
III. Micro-site high-precision twinning
Millimeter-level modeling for key urban fields (main roads, traffic intersections, core facilities, key buildings) to provide spatial support for refined management and emergency response.