Proyectos
Sistemas aéreos no tripulados de inspección y exterminio

En el contexto de los actuales esfuerzos nacionales por promover la autosuficiencia científica y tecnológica y la modernización digital industrial, el trabajo inteligente y no tripulado en exteriores se ha convertido en una tendencia de desarrollo clave. Para satisfacer las necesidades de inspección y exterminio en entornos complejos como parques y carreteras, hemos desarrollado el “Sistema de Vehículos No Tripulados de Inspección y Exterminio Inteligentes”. El objetivo de este proyecto es construir una plataforma nacional de operaciones no tripuladas que integre detección de alta precisión, toma de decisiones autónoma y capacidad de operación estable y continua, que resuelva eficazmente los problemas de baja eficiencia y alto riesgo de la operación manual tradicional y los peligros para la seguridad de depender de tecnología extranjera en algunas de las soluciones existentes.
El contenido central de la investigación de este sistema consiste en construir una arquitectura técnica multicapa y muy robusta. En la capa de percepción, integramos en profundidad una serie de tecnologías de sensores avanzadas: obtención de información de posición de alta precisión a nivel centimétrico mediante el módulo de posicionamiento diferencial RTK, que sienta una base sólida para la planificación de trayectorias y la navegación autónoma; escaneado 3D en tiempo real del entorno circundante mediante LIDAR mecánico multilínea, que detecta con precisión los contornos y las distancias de los obstáculos; y complementación con una cámara de reconocimiento de matrículas de alto rendimiento, que enriquece aún más la dimensión de reconocimiento de objetos y adquisición de datos del sistema. La cámara de reconocimiento de matrículas de alto rendimiento enriquece aún más la dimensión de reconocimiento de objetos y adquisición de datos del sistema. Los tres juntos constituyen los potentes “ojos” del sistema, que le permiten comprender de forma exhaustiva y precisa el complejo y cambiante entorno exterior.
En el nivel de procesamiento de datos y toma de decisiones, el sistema adopta de forma innovadora el modelo de computación colaborativa “cloud-edge-end”. A través de la pasarela integrada en el vehículo, el sistema admite la transmisión de datos de doble canal 4G/WiFi, lo que garantiza la redundancia y la fiabilidad del enlace de comunicación. Especialmente, hemos introducido una pasarela de computación de borde de alto rendimiento para hundir las tareas de procesamiento de IA (por ejemplo, el reconocimiento dinámico de obstáculos, el análisis en tiempo real de eventos anormales y la toma de decisiones para la eliminación) del kucu a la ejecución local. Este diseño no solo reduce significativamente la dependencia continua de la computación en nube y la presión sobre el ancho de banda de la red, sino que también acorta en gran medida el retardo de respuesta del sistema, lo que permite al vehículo no tripulado lograr una evasión de obstáculos autónoma de nivel de milisegundos y una respuesta inteligente ante situaciones imprevistas, y mejora el nivel de inteligencia y seguridad de las operaciones.
En cuanto a la garantía de funcionamiento continuo, el sistema está especialmente equipado con un sistema de alimentación ininterrumpida UPS. Este diseño garantiza que, en caso de condiciones de trabajo extremas, como cortes repentinos del suministro eléctrico externo, el vehículo no tripulado pueda mantener el funcionamiento normal de los sistemas clave y ejecutar órdenes como el retorno seguro al vuelo o la espera, logrando así una verdadera capacidad operativa ininterrumpida en todas las condiciones meteorológicas en la zona designada.
Puntos de innovación tecnológica
Sistema de detección por fusión multidimensional de alta precisión
La integración de RTK, LIDAR multilínea y cámara de visión crea una capacidad de posicionamiento a nivel centimétrico y de detección del entorno en 3D adecuada para escenas exteriores complejas, superando las limitaciones de un solo sensor.
Arquitectura de decisión inteligente para la colaboración en la nube
Al desplegar una pasarela de computación periférica, se consigue un procesamiento localizado en tiempo real de las tareas de IA, lo que reduce la latencia del sistema y la dependencia de las comunicaciones en la nube, y mejora la autonomía y fiabilidad del trabajo.
Diseño de energía y comunicaciones de alta fiabilidad
El uso del sistema de alimentación ininterrumpida UPS para salvaguardar la misión crítica sin dejar de funcionar, y la combinación de transmisión de datos de doble canal 4G/WiFi garantiza el funcionamiento continuo y la redundancia del enlace de comunicación en entornos complejos.
Soluciones domésticas de pila completa para situaciones complejas
La tecnología de la plataforma es autónoma y controlable, integra la cadena tecnológica completa desde la detección, la toma de decisiones hasta la ejecución, y proporciona una respuesta de integración de sistemas altamente fiable, autónoma y localizada para tareas de inspección y exterminio en exteriores.


escenario de aplicación
La plataforma puede utilizarse ampliamente en escenarios exteriores complejos, como la inspección de parques, la inspección de carreteras, el exterminio público y la respuesta a emergencias, realizando operaciones autónomas eficientes, no tripuladas y en cualquier condición meteorológica.
Enfoque basado en los resultados
Inversión en capital social, capital riesgo, concesión de licencias, codesarrollo, cooperación en la creación de nuevas empresas
Identificación inteligente del sistema de robots de limpieza de carreteras en el aire y en tierra

Con el fin de satisfacer la demanda principal de “inspección de cobertura total, posicionamiento preciso y barrido eficiente” del trabajo de saneamiento, la empresa identifica con precisión la basura a través de su plataforma de inspección inteligente de desarrollo propio para drones y tecnología de reconocimiento de IA de gran modelo, y al mismo tiempo realiza la “identificación-alarma-programación-barrido” mediante las sinergias inteligentes entre el empuje automático de alarma y los vehículos de barrido no tripulados en tierra. bucle cerrado "identificación-alarma-despacho-barrido". En comparación con el modo de saneamiento manual tradicional, reduce significativamente la intensidad de trabajo de la mano de obra de primera línea, mejora el nivel de gestión fina de las operaciones de saneamiento y alcanza el objetivo de una gobernanza medioambiental eficiente y con bajas emisiones de carbono.

El sistema está profundamente integrado con “no tripulado + inteligente”, realizando la operación totalmente autónoma de drones y vehículos de barrido al mismo tiempo, rompiendo la limitación de la “automatización de un solo equipo” en la industria, y construyendo una solución integrada de “cobertura de patrulla aérea + aterrizaje de barrido terrestre”. La solución integrada de "cobertura de patrulla aérea + aterrizaje de barrido terrestre", con una notable singularidad técnica y liderazgo en la industria, proporciona un nuevo paradigma para la mejora inteligente del saneamiento.
Plataforma de Ciudades Inteligentes Gemelas Digitales de Zhongxinhang
Zhongxinhang Digital Twin Smart City Platform es un “sistema operativo digital a nivel de ciudad” de nueva generación para la construcción de nuevas ciudades inteligentes, que se ejecuta a través del “Centro de Datos - Orientación Estratégica”, con las características principales de “digitalización completa de los elementos, estado completo en tiempo real e inteligencia completa de los procesos”. Con las características principales de “digitalización de todos los elementos, tiempo real de todos los estados e inteligencia de todos los procesos”, apoya el bucle cerrado integrado de "inspección visual, gestión visual y toma de decisiones visual" a través de la cartografía precisa de la ciudad física y la ciudad digital, realiza la actualización entre modos de la toma de decisiones a nivel de ciudad y reconfigura las dimensiones de la gestión de la ciudad, y proporciona apoyo espacial integrado para la planificación urbana. Proporciona un soporte espacial integrado para la planificación urbana.
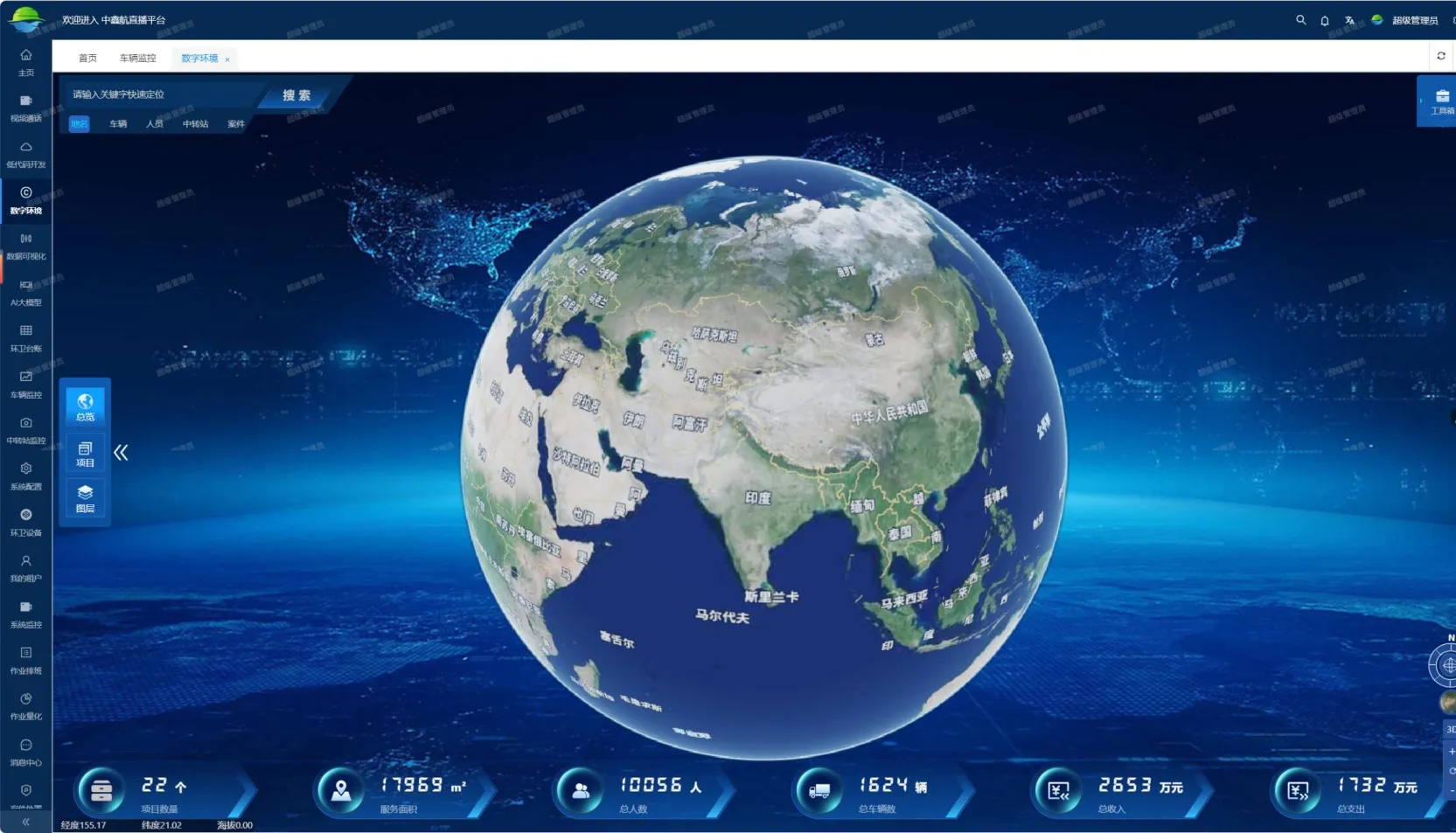
I. Hermanamiento de alta precisión en mesorregiones
Tomando como soporte el hermanamiento de alta precisión de las mesorregiones, abre una macrovisión de los recursos globales de la ciudad y realiza “un vistazo a la situación general” y una visión de conjunto de los elementos de toda la zona. Visualiza la distribución de los proyectos clave, la escala del personal y otros indicadores clave en el modelo digital de la tierra, capta la macro situación del funcionamiento urbano y apoya la búsqueda y el posicionamiento multidimensionales.
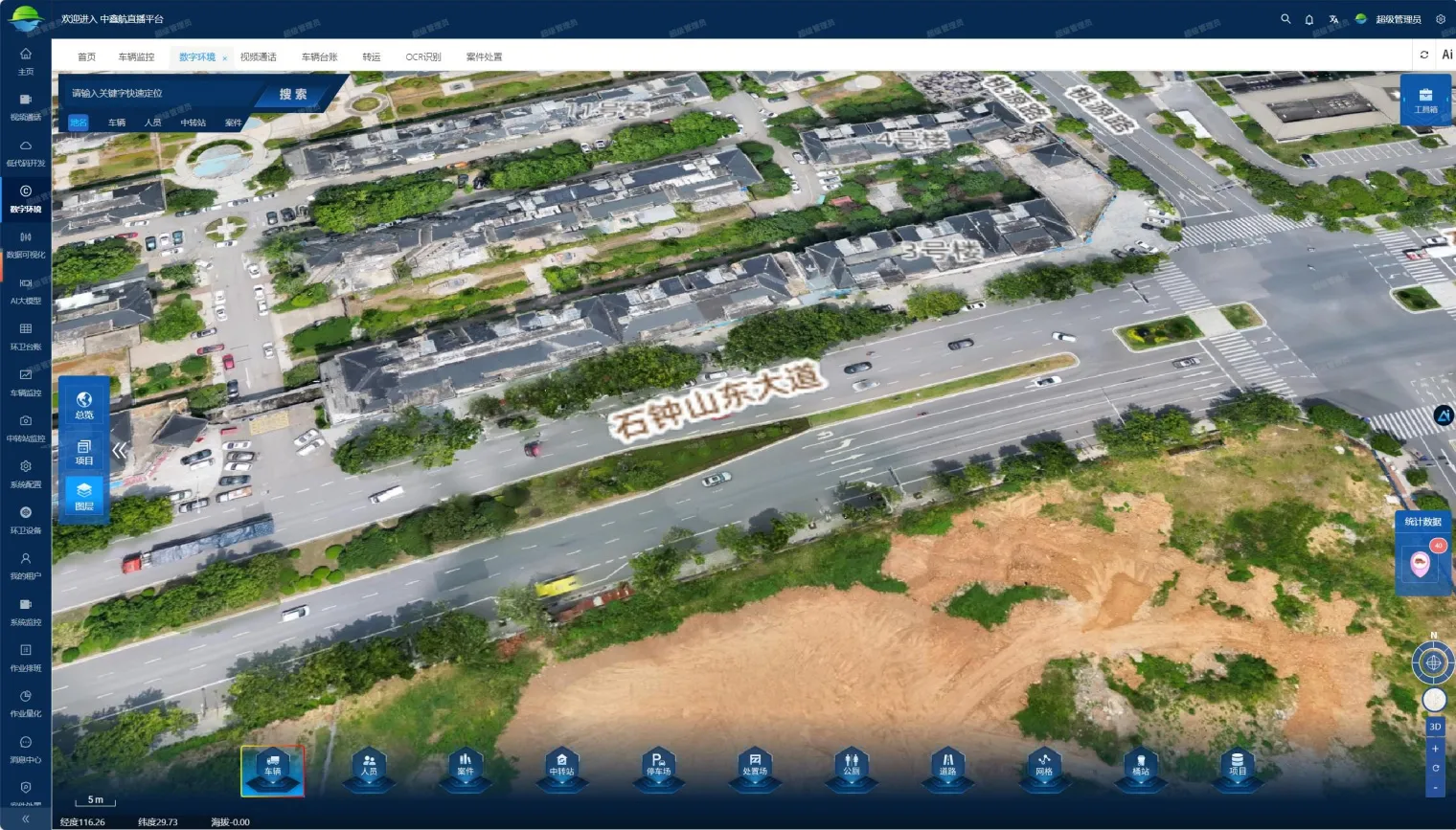
II. Hermanamiento de alta precisión en mesorregiones
Centrándose en zonas clave (polígonos industriales, nudos de transporte, distritos empresariales centrales, nuevas zonas de gobierno), realiza la cartografía de elementos espaciales y la asociación dinámica: construcción unidimensional de carreteras, ríos, etc., para restablecer las características espaciales regionales y las relaciones topológicas; superposición de vehículos, personas y otros elementos, para mostrar la distribución del estado asociado y apoyar la gobernanza colaborativa.
III. Hermanamiento de alta precisión en micrositios
La modelización a escala milimétrica se realiza para campos urbanos clave (carreteras principales, cruces de tráfico, instalaciones centrales, edificios clave) con el fin de proporcionar apoyo espacial para una gestión refinada y una respuesta de emergencia.