Projets
Systèmes aériens sans pilote d'inspection et d'extermination

Dans le cadre des efforts nationaux actuels visant à promouvoir l'autonomie scientifique et technologique et la modernisation numérique de l'industrie, le travail intelligent et sans pilote en extérieur est devenu une tendance clé du développement. Afin de répondre aux besoins d'inspection et d'extermination dans des environnements complexes tels que les parcs et les routes, nous avons développé le “système intelligent de véhicules sans pilote pour l'inspection et l'élimination”. Ce projet vise à construire une plate-forme nationale d'opérations sans pilote intégrant une détection de haute précision, une prise de décision autonome et une capacité d'opération stable et continue, qui résout efficacement les problèmes de faible efficacité et de risque élevé des opérations manuelles traditionnelles et les risques de sécurité liés à la dépendance à l'égard de la technologie étrangère dans certaines des solutions existantes.
Le cœur de la recherche de ce système est la construction d'une architecture technique multicouche et très robuste. Dans la couche de perception, nous intégrons en profondeur un certain nombre de technologies de capteurs avancées : l'obtention d'informations de position de haute précision au centimètre près grâce au module de positionnement différentiel RTK, qui jette des bases solides pour la planification de la trajectoire et la navigation autonome ; le balayage 3D en temps réel du milieu environnant à l'aide d'un LIDAR mécanique multiligne, qui détecte avec précision les contours et les distances des obstacles ; et l'ajout d'une caméra de reconnaissance de plaques minéralogiques haute performance, qui enrichit encore la dimension de reconnaissance d'objets et d'acquisition de données du système. Le système est complété par une caméra de reconnaissance de plaques d'immatriculation très performante. Ces trois éléments constituent les “yeux” puissants du système, qui lui permettent de comprendre de manière complète et précise l'environnement extérieur complexe et changeant.
Au niveau du traitement des données et de la prise de décision, le système adopte de manière innovante le modèle d'informatique collaborative “cloud-edge-end”. Grâce à la passerelle embarquée, le système prend en charge la transmission de données à double canal 4G/WiFi, ce qui garantit la redondance et la fiabilité du lien de communication. En particulier, nous avons introduit une passerelle d'informatique périphérique haute performance pour transférer les tâches de traitement de l'IA (par exemple, la reconnaissance dynamique des obstacles, l'analyse en temps réel des événements anormaux et la prise de décision pour l'élimination) du noyau⼼ à l'exécution locale. Cette conception permet non seulement de réduire considérablement la dépendance continue à l'égard de l'informatique en nuage et la pression de la bande passante du réseau, mais aussi de raccourcir considérablement le délai de réponse du système, ce qui permet au véhicule sans conducteur d'éviter les obstacles de manière autonome au niveau de la milliseconde et de réagir de manière intelligente face à des situations imprévues, et d'améliorer l'intelligence et la sécurité des opérations.
En termes de garantie de fonctionnement continu, le système est spécialement équipé d'un système d'alimentation sans interruption UPS. Cette conception garantit qu'en cas de conditions de travail extrêmes, telles que des coupures de courant externes soudaines, le véhicule sans pilote peut maintenir le fonctionnement normal des systèmes clés et exécuter des commandes telles que le retour au vol en toute sécurité ou la mise en veille, ce qui permet d'obtenir une véritable capacité opérationnelle ininterrompue, par tous les temps, dans la zone désignée.
Points d'innovation technologique
Système de détection par fusion multidimensionnelle de haute précision
L'intégration du RTK, du LIDAR multiligne et de la caméra de vision permet un positionnement au centimètre près et une capacité de détection de l'environnement en 3D adaptée aux scènes extérieures complexes, surmontant ainsi les limites d'un seul capteur.
Architecture décisionnelle intelligente pour la collaboration en nuage
Le déploiement d'une passerelle informatique périphérique permet le traitement localisé en temps réel des tâches d'intelligence artificielle, ce qui réduit la latence du système et la dépendance à l'égard des communications en nuage, tout en améliorant l'autonomie et la fiabilité du travail.
Conception d'énergie et de communications hautement fiables
L'utilisation d'un système d'alimentation sans interruption (UPS) pour protéger les missions critiques sans tomber en panne, et la combinaison de la transmission de données à double canal 4G/WiFi garantissent un fonctionnement continu et une redondance des liens de communication dans des environnements complexes.
Des solutions complètes pour des scénarios complexes
La technologie de la plateforme est autonome et contrôlable, elle intègre la chaîne technologique complète, de la détection à l'exécution en passant par la prise de décision, et fournit une réponse d'intégration de système très fiable, très autonome et localisée pour les tâches d'inspection et d'extermination en extérieur.


scénario d'application
La plateforme peut être largement utilisée dans des scénarios complexes en extérieur, tels que l'inspection des parcs, l'inspection des routes, l'extermination publique et les interventions d'urgence, en réalisant des opérations autonomes efficaces, sans personnel et par tous les temps.
Approche axée sur les résultats
Prise de participation, capital-risque, octroi de licences, codéveloppement, coopération dans la création de nouvelles entreprises
Identification intelligente d'un système de robot de nettoyage des routes dans l'air et au sol

Afin de répondre à la demande fondamentale d“”inspection complète, de positionnement précis et de balayage efficace“ des travaux d'assainissement, l'entreprise identifie avec précision les déchets grâce à sa plateforme d'inspection intelligente développée par elle-même pour les drones et à sa technologie de reconnaissance par IA de grand modèle, et réalise en même temps l”"identification-alarme-planification-balayage" grâce aux synergies intelligentes entre le déclenchement automatique des alarmes et les véhicules de balayage sans pilote sur le terrain. Identification-alarme-répartition-balayage" en boucle fermée. Par rapport au mode d'assainissement manuel traditionnel, il réduit considérablement l'intensité du travail de la main-d'œuvre de première ligne, améliore le niveau de gestion fine des opérations d'assainissement et permet d'atteindre l'objectif d'une gouvernance environnementale efficace et à faible émission de carbone.

Le système est profondément intégré à “unmanned+intelligent”, réalisant le fonctionnement entièrement autonome des drones et des véhicules de balayage en même temps, brisant la limite de “l'automatisation d'un seul équipement” dans l'industrie, et construisant une solution intégrée de “couverture de patrouille aérienne + atterrissage de balayage au sol”. La solution intégrée "patrouille aérienne + balayage au sol", qui se distingue par son caractère technique unique et sa position de leader dans l'industrie, constitue un tout nouveau paradigme pour l'amélioration intelligente de l'assainissement.
Plate-forme de ville intelligente Zhongxinhang Digital Twin
Zhongxinhang Digital Twin Smart City Platform est un “système d'exploitation numérique au niveau de la ville” de nouvelle génération pour la construction de nouvelles villes intelligentes, qui fonctionne selon l'orientation “Centre de données - Stratégie”, avec les caractéristiques principales de “numérisation complète des éléments, état complet en temps réel et intelligence complète des processus”. Avec les caractéristiques essentielles de la “numérisation de tous les éléments, de l'état en temps réel de tous les états et de l'intelligence de tous les processus”, il soutient la boucle fermée intégrée de "l'inspection visuelle, la gestion visuelle et la prise de décision visuelle" grâce à la cartographie précise de la ville physique et de la ville numérique, réalise la mise à niveau intermodale de la prise de décision au niveau de la ville et reconfigure les dimensions de la gestion de la ville, et fournit un soutien spatial intégré pour la planification urbaine. Il fournit un soutien spatial intégré à la planification urbaine.
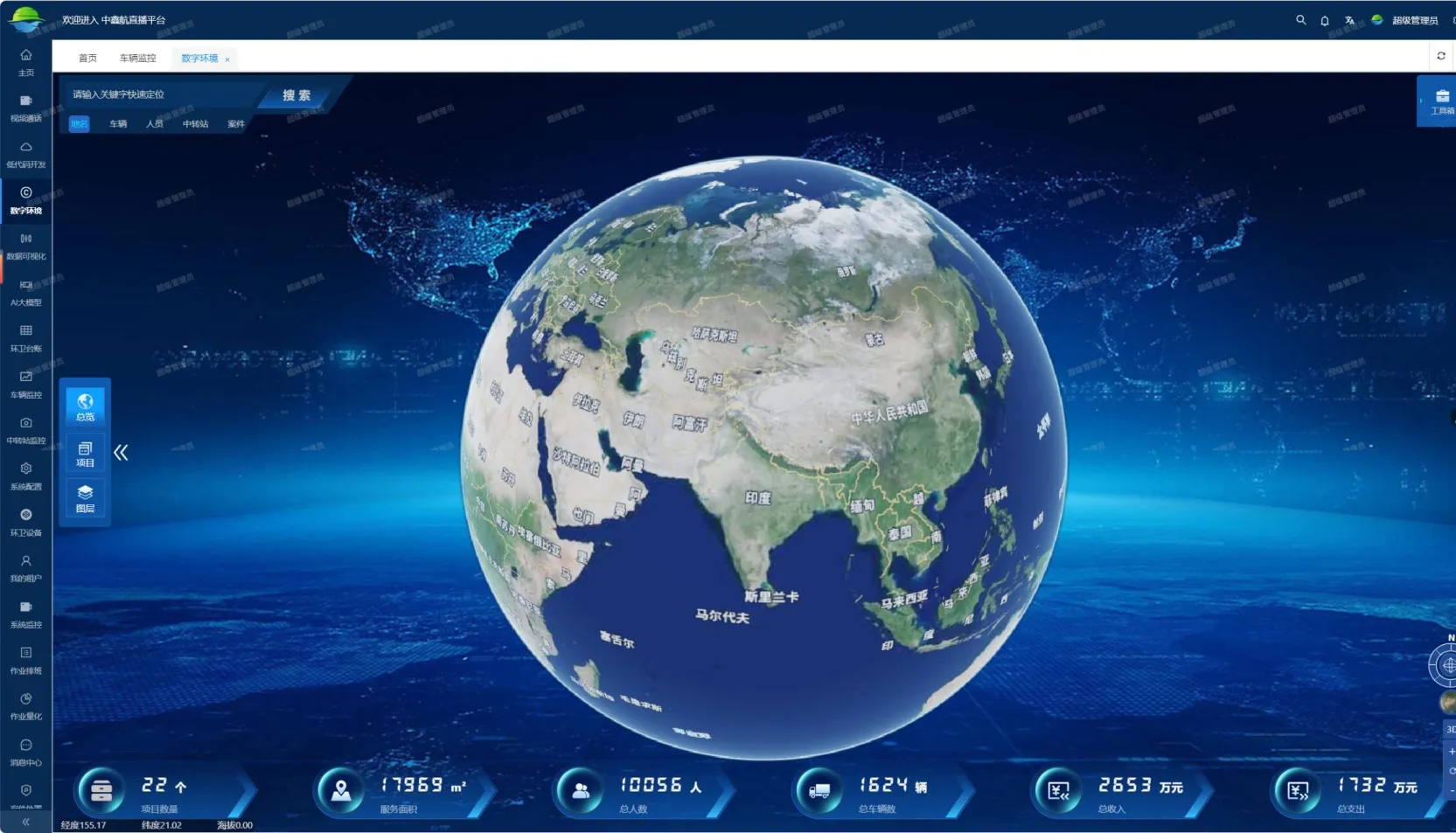
I. Jumelage de haute précision dans les méso-régions
En s'appuyant sur le jumelage de haute précision des méso-régions, il offre une vue macro des ressources globales de la ville et permet d'obtenir une vue d'ensemble de la “situation globale en un coup d'œil” des éléments de l'ensemble de la zone. Visualiser la distribution des projets clés, l'échelle du personnel et d'autres indicateurs clés sur le modèle numérique de la terre, saisir la macro situation du fonctionnement urbain et soutenir la recherche et le positionnement multidimensionnels.
II. jumelage de haute précision dans les méso-régions
En se concentrant sur les zones clés (parcs industriels, centres de transport, quartiers d'affaires, nouvelles zones gouvernementales), il réalise une cartographie des éléments spatiaux et une association dynamique : construction unidimensionnelle de routes, de rivières, etc., pour restaurer les caractéristiques spatiales régionales et les relations topologiques ; superposition de véhicules, de personnes et d'autres éléments, pour montrer la distribution de l'état associé et soutenir la gouvernance collaborative.
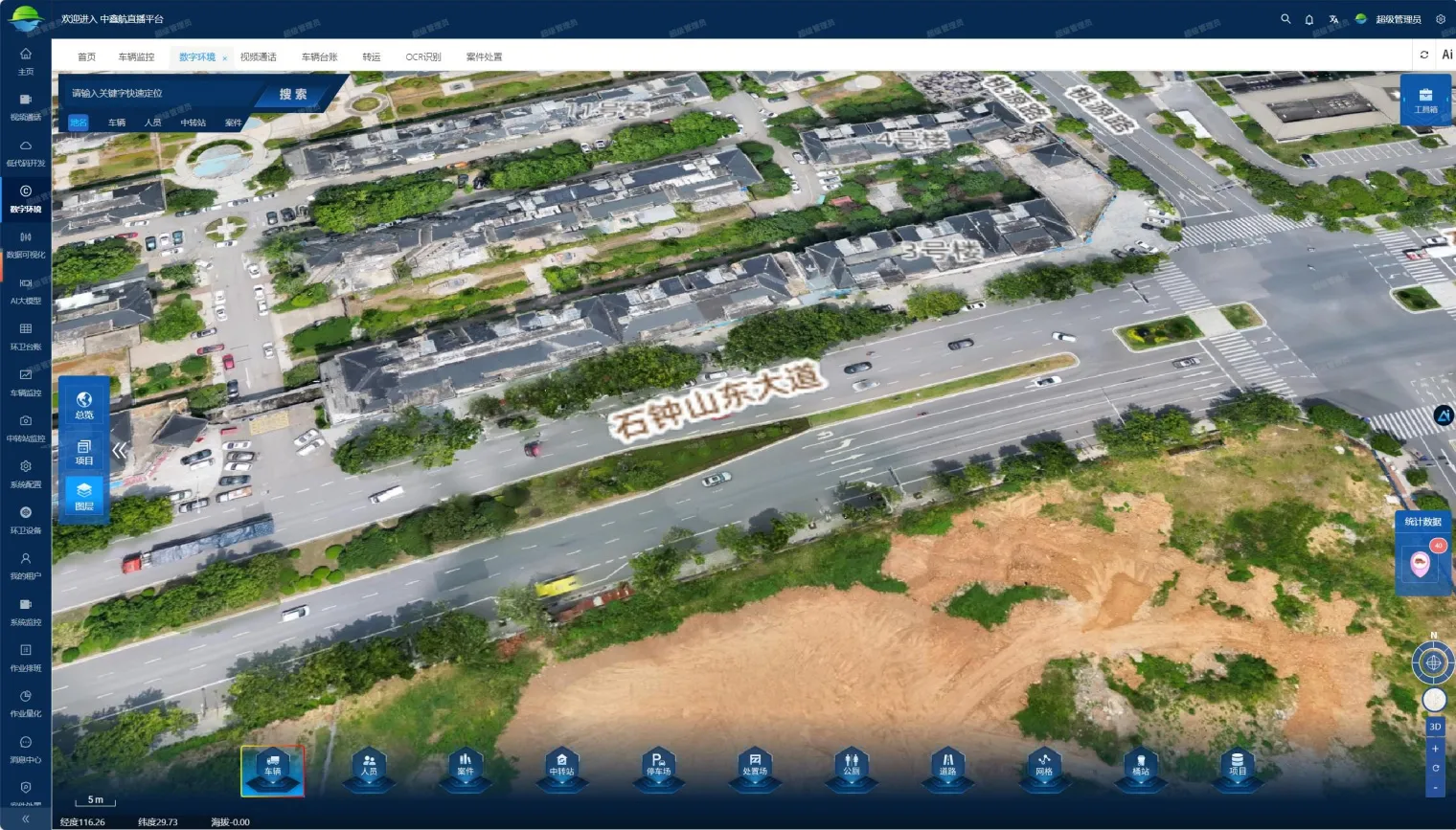
III. jumelage de haute précision sur micro-site
La modélisation à l'échelle du millimètre est effectuée pour les zones urbaines clés (routes principales, carrefours, installations principales, bâtiments clés) afin de fournir un soutien spatial pour une gestion affinée et une réponse aux situations d'urgence.