プロジェクト
点検・駆除用無人航空機システム

現在、国家が科学技術の自立と産業のデジタル化を推進する背景の下で、インテリジェントな屋外無人作業が重要な発展トレンドとなっている。公園や道路など複雑な環境での点検・駆除のニーズに対応するため、当社は「インテリジェント点検・駆除無人車システム」を開発した。このプロジェクトは、高精度のセンシング、自律的な意思決定、安定した連続運転能力を統合した国産無人運転プラットフォームの構築を目指しており、従来の手作業による低効率・高リスクの問題や、既存のいくつかのソリューションにおける外国技術に依存することによる安全上の危険性を効果的に解決している。
このシステムの中核となる研究内容は、多層構造で非常に堅牢な技術アーキテクチャを構築することである。すなわち、RTKディファレンシャル測位モジュールによりセンチメートルレベルの高精度位置情報を取得し、経路計画と自律ナビゲーションのための強固な基盤を構築すること、マルチラインメカニカルLIDARにより周辺環境をリアルタイムで3Dスキャンし、障害物の輪郭と距離を正確に検出すること、高性能ナンバープレート認識カメラで補完することにより、システムの物体認識とデータ取得の次元をさらに豊かにすることである。高性能ナンバープレート認識カメラは、システムの物体認識とデータ取得の次元をさらに豊かにする。これら3つがシステムの強力な「目」を構成し、複雑で変化する屋外環境を総合的かつ正確に把握することを可能にしている。
データ処理と意思決定レベルでは、システムは革新的に「クラウドエッジエンド」協調コンピューティングモデルを採用しています。車載ゲートウェイを通じて、システムは4G/WiFiデュアルチャンネルデータ伝送をサポートし、通信リンクの冗長性と信頼性を確保します。特に、高性能なエッジコンピューティング・ゲートウェイを導入し、kucuのAI処理タスク(動的障害物認識、異常事象のリアルタイム分析、排除のための意思決定など)をローカル実行にシンクする。この設計により、クラウドコンピューティングへの継続的な依存とネットワーク帯域幅の圧迫を大幅に軽減するだけでなく、システムの応答遅延を大幅に短縮し、無人車両が不測の事態に直面してもミリ秒レベルの自律的な障害物回避とインテリジェントな応答を実現し、インテリジェンスレベルと運用の安全性を向上させることができる。
連続稼動保証の観点から、システムは特別にUPS無停電電源システムを装備している。この設計により、外部からの突然の停電のような極端な作業条件でも、無人ビークルは主要システムの正常な動作を維持し、安全な飛行への復帰や待機などのコマンドを実行することができ、指定されたエリアでの真の全天候型無停電運用能力を実現します。
技術革新のポイント
多次元高精度フュージョンセンシングシステム
RTK、マルチラインLIDAR、ビジョンカメラの統合により、複雑な屋外シーンに適したセンチメートルレベルの測位と3D環境センシング機能が構築され、単一センサーの限界を克服している。
クラウドエッジ・コラボレーションのためのインテリジェントな意思決定アーキテクチャ
エッジ・コンピューティング・ゲートウェイを導入することで、AIタスクのローカライズされたリアルタイム処理を実現し、システムの待ち時間とクラウド通信への依存を減らし、ジョブの自律性と信頼性を向上させる。
信頼性の高いエネルギー・通信設計
UPS無停電電源装置を使用することで、ミッションクリティカルを無停電で保護し、4G/WiFiデュアルチャンネルデータ伝送を組み合わせることで、複雑な環境でも継続的な動作と通信リンクの冗長性を確保します。
複雑なシナリオに対応する国産のフルスタック・ソリューション
このプラットフォームのテクノロジーは自律的で制御可能であり、センシングから意思決定、実行までの完全なテクノロジー・チェーンを統合し、屋外の検査や駆除作業に対して、信頼性が高く、自律的で局所的なシステム統合の答えを提供する。


アプリケーションシナリオ
このプラットフォームは、公園点検、道路点検、公共駆除、緊急対応など、複雑な屋外シナリオで広く使用することができ、全天候型、無人、効率的な自律オペレーションを実現する。
結果に基づくアプローチ
株式投資、ベンチャーキャピタル、ライセンス供与、共同開発、新規事業立ち上げの協力
空中・地上における道路清掃ロボットシステムの知的識別

衛生作業の「全面検査、正確な位置決め、効率的な掃討」という核心需要を満たすため、同社は自社開発したドローン用インテリジェント検査プラットフォームと大型AI認識技術により、ゴミを正確に識別すると同時に、自動アラームプッシュと地上無人掃討車のインテリジェント相乗度により、「識別-アラーム-スケジューリング-掃討」を実現した。識別-警報-出動-清掃」のクローズドループ。伝統的な手動衛生モードに比べ、第一線人員の労働強度を大幅に削減し、衛生業務の細かい管理レベルを向上させ、効率的で低炭素な環境ガバナンスの目標を達成する。

システムは「無人+インテリジェント」と深く融合し、ドローンと清掃車の完全自律運転を同時に実現し、業界の「単一設備自動化」の限界を打ち破り、「空中巡回カバー+地上清掃着陸」の統合ソリューションを構築した。空中哨戒+地上掃討着陸」の統合ソリューションは、技術的な独自性が際立ち、業界をリードしており、衛生設備のインテリジェント化に全く新しいパラダイムを提供している。
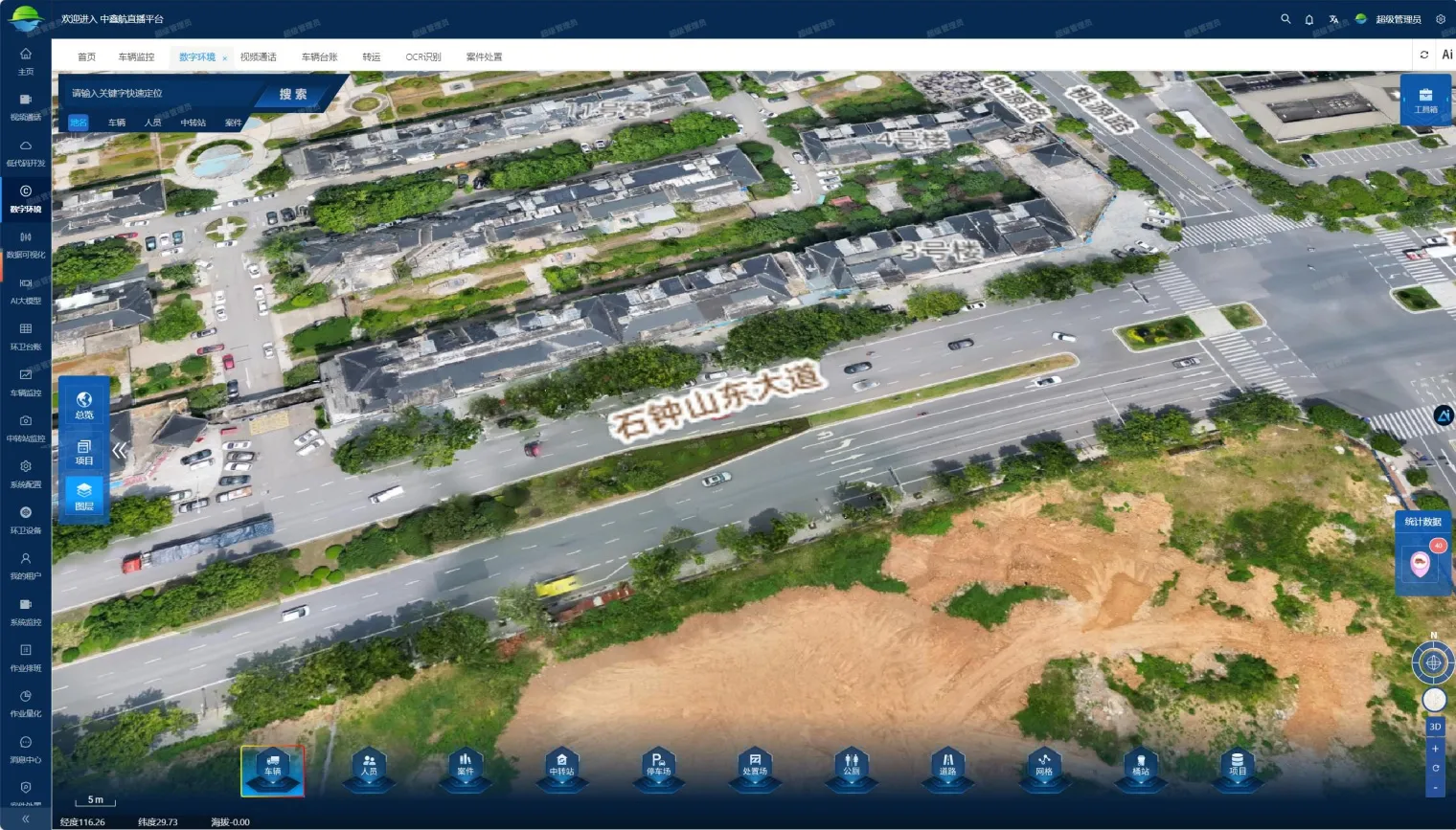
中新港デジタルツイン・スマートシティ・プラットフォーム
中新港デジタルツイン・スマートシティ・プラットフォームは、新しいスマートシティ建設のための新世代の「都市レベル・デジタル・オペレーティング・システム」であり、「データセンター-戦略志向」を貫き、「要素の完全デジタル化、状態の完全リアルタイム化、プロセスの完全インテリジェンス化」を核心特徴とする。全要素のデジタル化、全状態のリアルタイム化、全プロセスのインテリジェンス」を核心特性とし、物理都市とデジタル都市の正確なマッピングを通じて、「視覚的検査、視覚的管理、視覚的意思決定」の統合された閉ループをサポートし、都市レベルの意思決定のクロスモードアップグレードを実現し、都市管理の次元を再構成し、都市計画に統合された空間サポートを提供する。都市計画の統合的な空間サポートを提供します。
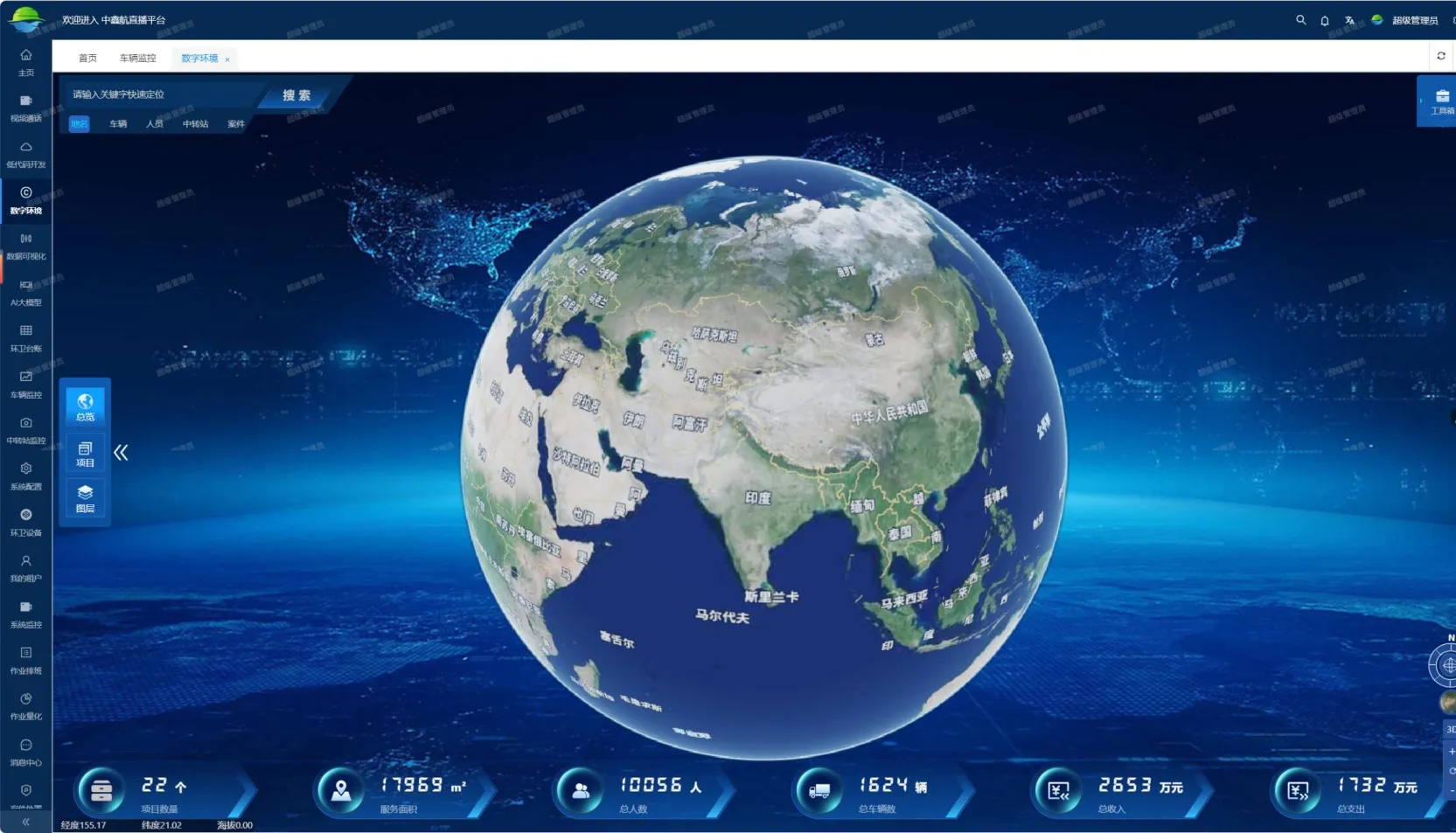
I. メソ領域における高精度ツインニング
中地域の高精度ツイニングを媒介として、都市全体の資源をマクロに俯瞰し、「全地域の状況が一目でわかる」全体俯瞰を実現する。デジタルアースモデル上で重要プロジェクトの分布、人員規模などの重要指標を可視化し、都市運営のマクロ状況を把握し、多角的な検索と測位をサポートする。
II.メソ領域における高精度ツインニング
重点地域(工業団地、交通拠点、中核ビジネス地区、新政府地区)に焦点を当て、空間要素のマッピングとダイナミックな関連付けを実現する。道路、河川などを一次元的に構築し、地域の空間的特徴や地形的関係を復元し、車、人、その他の要素を重ね合わせることで、関連する状態の分布を示し、協調的なガバナンスをサポートする。
III.マイクロサイト高精度ツインニング
ミリメートル・スケールのモデリングは、都市の主要な分野(幹線道路、交通の分岐点、中核施設、主要な建物)について実施され、洗練された管理と緊急事態への対応に空間的なサポートを提供する。